Our new firmware improves positioning accuracy during scintillation by 60%

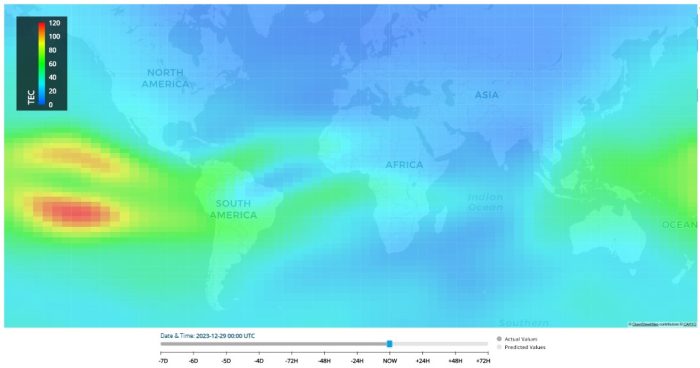
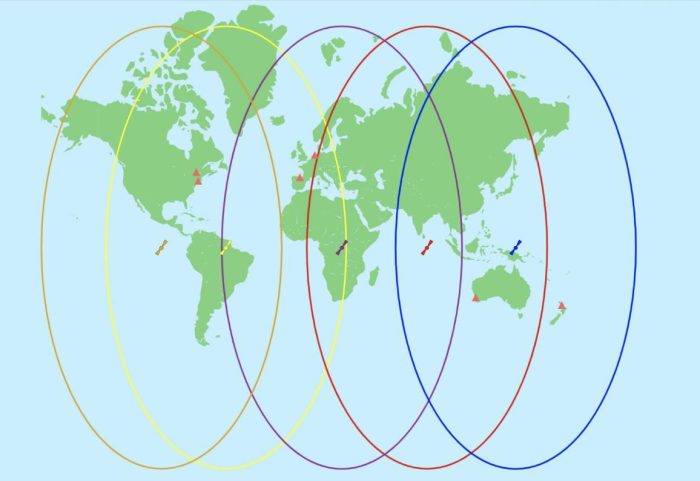
As we continue into solar cycle 25, ionospheric scintillation impacts on GNSS will only get worse.
Hexagon | NovAtel is dedicated to ensuring the highest precision in positioning, navigation and timing measurements. Part of our responsibility to our customers means providing resources to understand scintillation — including how to build a resilient system.
Now, we’re proud to share new firmware with positioning improvements that empower users to withstand ionospheric activity better than ever before.
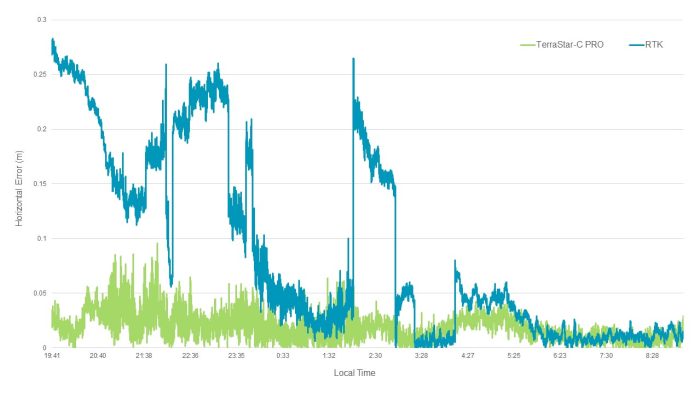
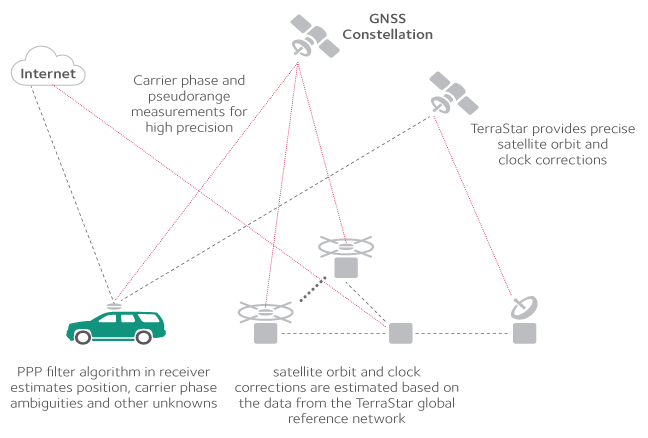
The firmware demonstrated 60% PPP accuracy improvements during peak scintillation events, resulting in an operational uptime of >90% for PPP users.*
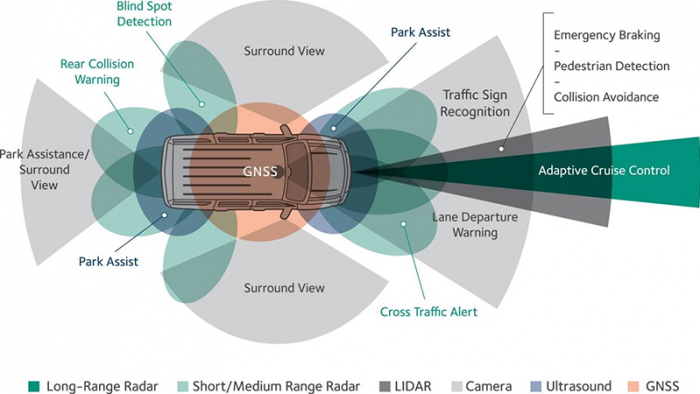
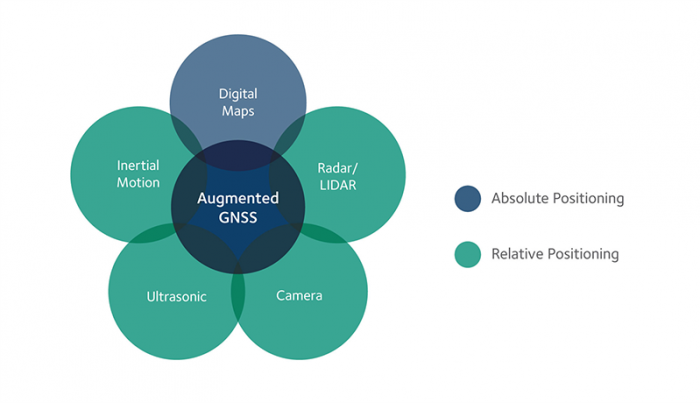
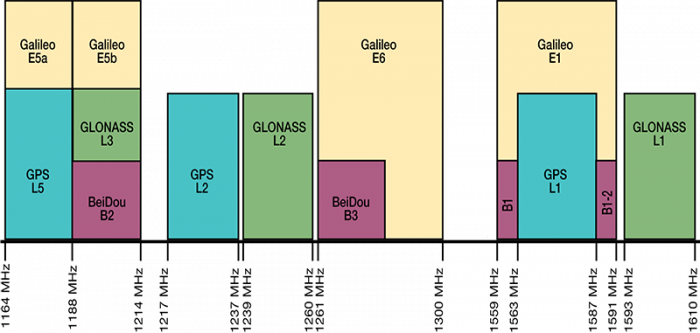
A vital part of these improvements lies in the combination of multi-constellation and multi-frequency GNSS receivers and TerraStar corrections from NovAtel. With higher signal availability and diversity of positioning data, NovAtel customers will see a marked improvement in positioning accuracy and reliability during scintillation events.
Learn more about our new firmware, including download instructions, by visiting our website.
READ OUR FIRMWARE BULLETIN >>>
*Improvement in average horizontal error during scintillation period when compared to previous firmware versions. Uptime represents a percentage of a 24-hour period operating in a scintillation-prone region where TerraStar-C PRO solution accuracy is less than five centimetres. Performance varies and is subject to the local environment and the duration and magnitude of scintillation.
Per maggiori informazioni contattaci:
https://www.lunitek.it/contatta-sensoristica-e-acquisizione-dati/