







TRACCIABILITÀ PEDONALE A PIÙ PIANI IN TEMPO REALE CON UN’UNICA IMU XSENS MTW AWINDA
The Internet of Things (IoT) Lab coordina le varie attività e collaborazioni in corso, nell’ambito IoT e dei sistemi intelligenti, tra il Dipartimento di Ingegneria e Architettura dell’Università di Parma e le aziende private (italiane e internazionali), altre università italiane e internazionali e agenzie istituzionali internazionali/nazionali/regionali.

LOCALIZZAZIONE E NAVIGAZIONE
Alcune delle ricerche attive del IoT Lab si concentrano sulla localizzazione e la navigazione. La determinazione delle posizioni e il monitoraggio dei movimenti di soggetti e/o dispositivi in ??diverse condizioni ambientali consentono una serie di nuove opportunità in applicazioni correlate agli attrezzi (ma non solo), quali servizi basati sulla localizzazione, controllo degli accessi, monitoraggio delle attività, navigazione in nuovi ambienti, ecc.
Le tecnologie commerciali attualmente disponibili, come quelle basate sul GPS, svolgono il loro compito adeguatamente in spazi aperti esterni, ma la loro affidabilità e precisione peggiorano drasticamente negli ambienti urbani e interni. Lo scopo del nostro laboratorio è quello di sviluppare sistemi di localizzazione e di monitoraggio facilmente distribuibili, precisi e agnostici. Tra le varie tecnologie attualmente considerate, la navigazione basata su sensori inerziali sembra molto promettente. Idealmente, sfruttando i segnali acquisiti da sensori inerziali come accelerometri e giroscopi, è possibile ricostruire il percorso di un soggetto/oggetto in movimento in qualsiasi ambiente, senza affidarsi a infrastrutture esterne (come nel caso dei sistemi di cattura ottica di movimento o come per le soluzioni GPS). Purtroppo, in casi reali, un monitoraggio preciso di posizioni e orientamenti è estremamente difficile, a causa del rumore che incide sulle misurazioni dei sensori, che introduce effetti di deriva e rende inaffidabile il sistema nel lungo periodo. Per queste ragioni, una soluzione robusta dovrebbe basarsi su sensori di alta qualità e tecniche specifiche per la riduzione degli errori, soprattutto quando viene utilizzato un limitato numero di dispositivi di rilevamento per ridurre la complessità ed i costi del sistema.
PEDESTRIAN DEAD REACKONING (PDR)
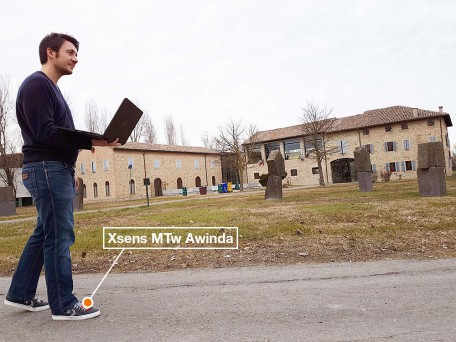
Nel contesto di ricerca descritto nel paragrafo precedente, essi hanno sviluppato un sistema (PDR), che si basa su un singolo sensore Xsens MTw Awinda a piede per ricostruire il percorso 3D del soggetto a piedi. I segnali acquisiti dal sensore posto sul piede, sotto le stringhe della scarpa (come si vede sulla sinistra di Fig. 1), vengono ricevuti dal dongle Xsens collegato a un computer portatile, su cui un’applicazione Matlab (sviluppata da IoT Lab ) sfrutta una versione modificata dell’API fornita da Xsens per la lettura e l’elaborazione dei dati.
 Figura 1 – La Xsens MTw Awinda IMU è posta sul piede destro, sotto i lacci della scarpa
Figura 1 – La Xsens MTw Awinda IMU è posta sul piede destro, sotto i lacci della scarpa

In particolare, il sistema calcola lo spostamento 3D del piede ogni volta che viene rilevato uno spostamento di posizione. Una versione modificata dell’algoritmo Zero Velocity UPdaTe (ZUPT), che consiste nella doppia integrazione dell’accelerazione lineare misurata dal sensore durante la fase di oscillazione del piede, è stata utilizzata per calcolare i movimenti orizzontali. Lo spostamento nella direzione verticale viene calcolato utilizzando le misure fornite dal barometro del nodo MTw. Una panoramica del sistema (mostrata in Fig. 2).
 Figura 2 – Una panoramica del sistema: l’IMU è posta sul piede, Il dongle di Xsens è collegato al computer portatile che sta eseguendo l’algoritmo. Lo smartphone è alloggiato nella tasca che fornisce la connessione internet e il riferimento GPS
Figura 2 – Una panoramica del sistema: l’IMU è posta sul piede, Il dongle di Xsens è collegato al computer portatile che sta eseguendo l’algoritmo. Lo smartphone è alloggiato nella tasca che fornisce la connessione internet e il riferimento GPS
La posizione 3D ottenuta viene prima convertita in coordinate di longitudine, latitudine e altitudine e quindi inviata a un server web utilizzando l’API RESTful implementata ad hoc con una connessione Internet fornita da uno smartphone (che raccoglie anche Posizioni GPS per scopi di confronto) alloggiato nella tasca del soggetto/oggetto di prova. Il server web memorizza le coordinate e mostra le sequenze di posizioni attraverso un’interfaccia web intuitiva che consente all’utente (e, eventualmente, ad altri dispositivi remoti) di connettersi al server e di visualizzare il percorso su una mappa (vedi Fig. 3).
 Figura 3 – L’interfaccia web consente di monitorare la stima in tempo reale del percorso
Figura 3 – L’interfaccia web consente di monitorare la stima in tempo reale del percorso

Di seguito nel collegamento YouTube viene presentato un vero e proprio test online del sistema proposto, eseguito presso il Centro Sant’Elisabetta del campus dell’Università di Parma. L’interfaccia web è costituita principalmente da una mappa, su cui vengono mostrate le sequenze di posizioni stimate sia dal sistema inerziale sviluppato (punti blu) che dal GPS (punti rossi) che dello smartphone. Inoltre, nella colonna a destra vengono visualizzati la direzione del nord geografico, la stima del piano (per la navigazione a più piani interni) e la precisione del GPS.
THE INTERNET OF THINGS (IOT) LAB
The Internet of Things (IoT) Lab coordina le varie attività e collaborazioni in corso come sopra descritto. Ad oggi, sono presenti attivamente circa otto membri a tempo pieno (docenti, post-doc, studenti di dottorato, associati alla ricerca), insieme a diversi altri collaboratori attivi. L’attuale attività di ricerca del IoT Lab si concentra su tre principali settori di ricerca intrecciati:
– ELABORAZIONE DEL SEGNALE
– COMUNICAZIONI AVANZATE E NETWORKING
– IOT E SISTEMI INTELLIGENTI
L’interdisciplinarietà è la chiave di tutte le attività di ricerca. La produzione scientifica del IoT Lab ha portato ad un gran numero di pubblicazioni scientifiche e alcuni dei più prestigiosi premi cartacei/tecnici nelle principali conferenze internazionali. Il laboratorio di IoT è attualmente dotato di una grande varietà di sistemi (con più di 150 nodi), che comprende molti standard di connettività wireless.
Il sistema Xsens acquisito da IoT Lab è stato cofinanziato dalla Cooperative Planning Programme Fund of NATO (Science and Technology Organization – Collaboration Support Office) per svolgere attività avanzate di ricerca di navigazione nel contesto della NATO RTG HFM 260 “Enhancing Warfighter Effectiveness with Wearable Bio Sensors and Physiologicol Models”.
Per maggiori informazioni contattaci:
https://www.lunitek.it/contatta-sensoristica-e-acquisizione-dati/