





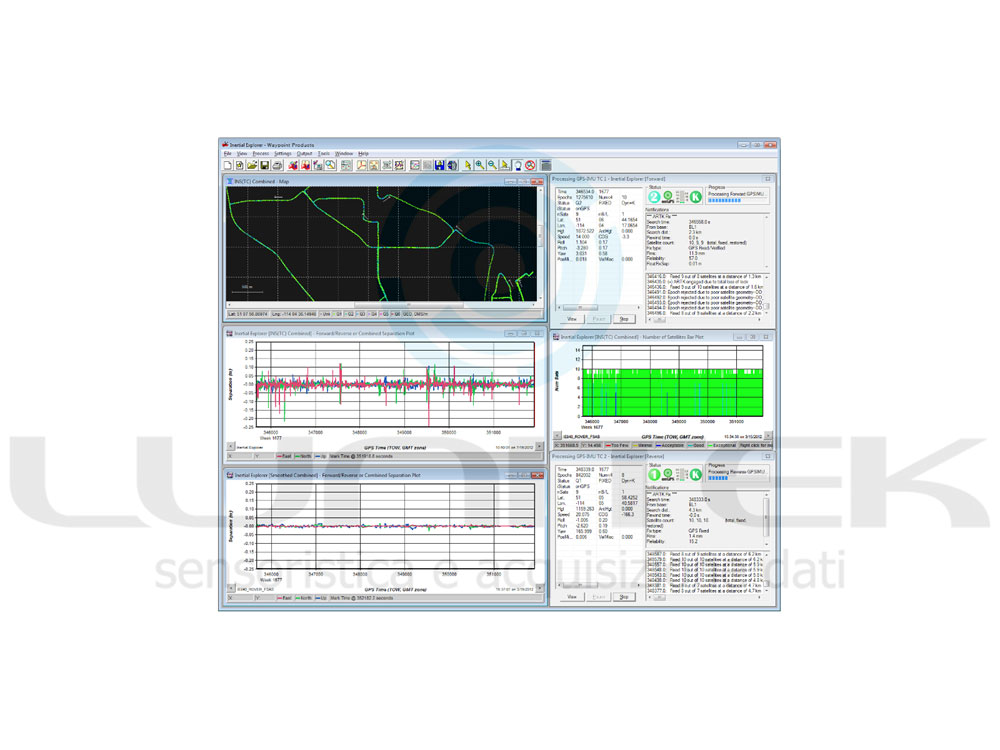
Inertial Explorer è un software specializzato nelle applicazioni di posizionamento di alta precisione in particolare nel campo della cinematica con la capacità di gestire un ampio raggio di ricevitori a cui integrare i dati provenienti da una piattaforma inerziale. Se si necessita di conoscere la propria posizione anche in assenza di segnale GPS con una piattaforma inerziale e questo software è possibile. L'integrazione dei dati GNSS e IMU fornisce risultati precisi anche quando vengono impiegati sensori poco precisi. Inertial Explorer produce risultati adattia diverse applicazioni come mappaggio di aree mobile e sorveglianza aerea e idrografica. Possono essere elaborati i dati IMU di giroscopi a fibre ottiche (FOG) e giroscopi ad anello laser (RLG) o da MEMS.
Inertial Explorer possiede un workflow che combacia con i propri bisogni e competenze. Attraverso un project wizard è possibile avviare il lavoro molto velocemente. Per gli utenti esperti è possibile modificare una vasta gamma di opzioni di configurazione. L'identificazione d'ambiente di elaborazione automatico (aereo veicoli di terra e marittimi) configura automaticamente l'elaborazione GNSS + INS per semplificare il lavoro e ridurre la conoscenza necessaria al funzionamento del programma.
Caratteristiche
- Elaborazione GNSS loosely o tightly coupled
- Modulo di puntamento per risolvere gli offset angolari tra i frame IMU e camera
- Novatel AdVance RTK
Vantaggi
- Facile integrazione con il proprio prodotto SPAN GNSS/IMU
- Project wizard per un facile avvio
- Elaborazione GNSS e IMU a singoli passi per flussi di lavoro efficienti
- Profili di elaborazioni integrati per progetti aeromobili di terra e marini
- Supporto di base station multiple
- Elaborazione PPP
