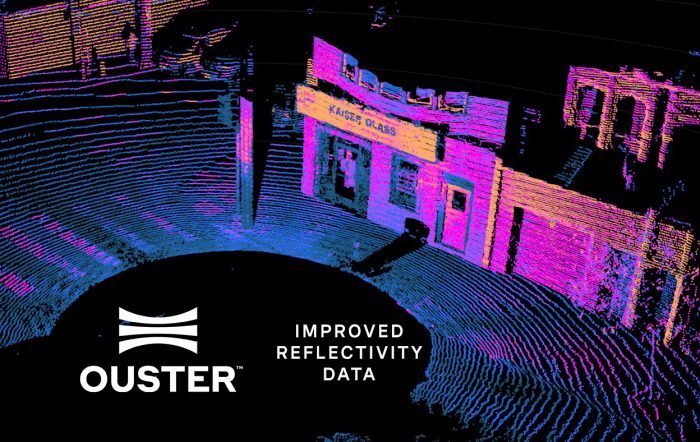
One of the major advantages of using Ouster Digital Lidar sensors is access to consistent firmware updates that dramatically improve sensor performance. With Firmware 2.1.1 we are continuing this trend, adding features that dramatically improve our sensors’ perception performance, improve detection probability of our sensors, and make them easier to work with.
Firmware 2.1.1 includes three major feature upgrades, along with bug fixes, to make our sensors even more effective for autonomy and smart infrastructure applications.
Per maggiori informazioni: Firmware 2.1.1: Better Perception Performance with Improved Reflectivity and Signal Multiplier mode | Ouster
Oppure contattaci:
https://www.lunitek.it/contatta-sensoristica-e-acquisizione-dati/