Airbus in Germany chooses Sentinel 3 RF over fibre system
PPM are pleased to announce the that another European Airbus site has chosen Sentinel 3. Airbus Defence and Spaceheadquarters in Ottobrunn, near Munich. have chosen to integrate the Sentinel 3 RF over fibre system to their data acquisition platform.

About Airbus Munich
Airbus are a partner in the Eurofighter Typhoon consortium which also includes BAe Systems and Leonardo. Other activities at the site include development and manufacture of Arian 5 rocket engines and production of solar panels for satellites. NASA’s James Webb Space Telescope was built in the Ottobrunn site which also houses some of Airbus’ support functions such as Airbus cyber security, information management and finance.
Saving time and improving accuracy.
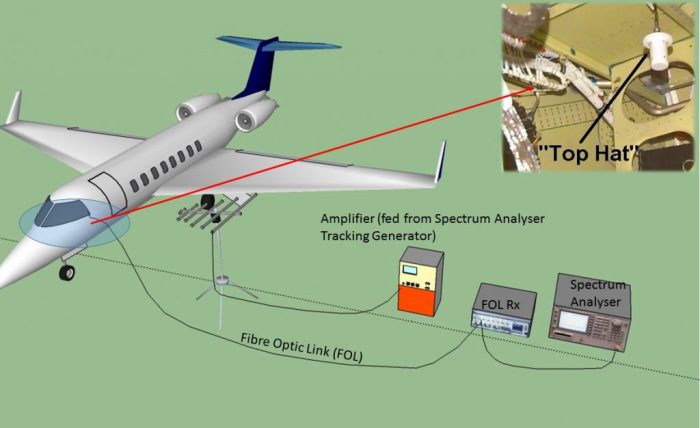
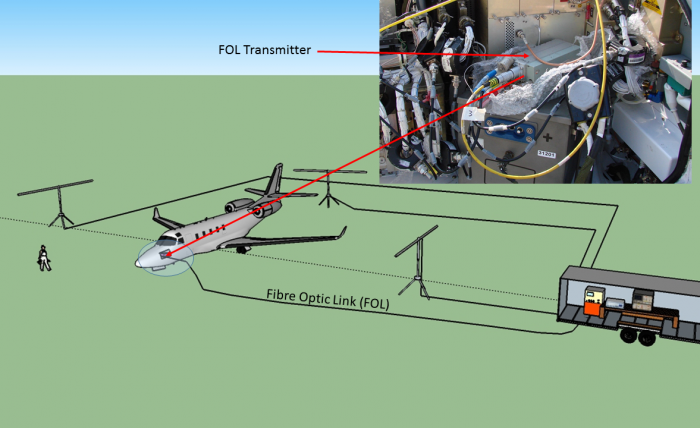
Sentinel 3 is the worlds most advanced RF over fibre system for EMC testing. The system was designed for rapid and flexible deployment, from remote transmitters through to the controller and receiver chassis. Upgrading to a Sentinel 3 system is anticipated to save a significant amount of setup time. Furthermore, features such as automatic thermal temperature compensation and 0.25dB accuracy specification are designed to improve measurement results.
PPM-supported Integration
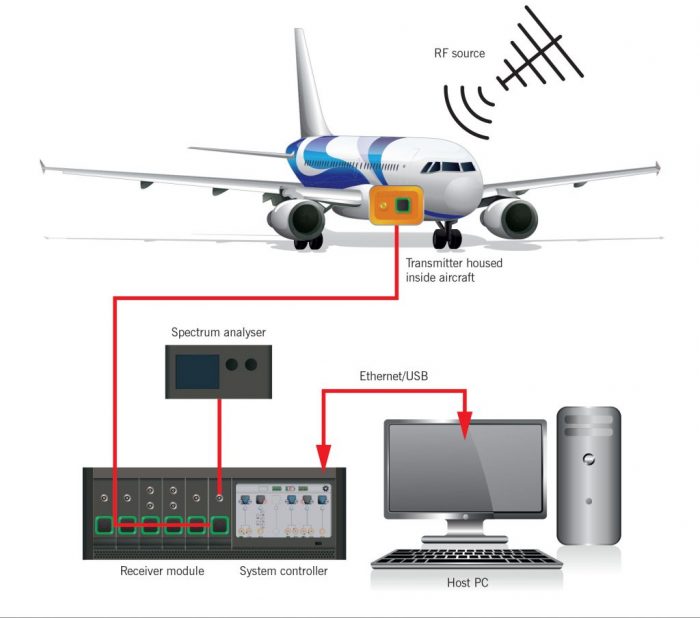
The Sentinel 3 system has been very well received by companies involved in the Eurofighter programme,” says Dr Martin Ryan – managing director of PPM. “We are very pleased to be supporting with another Airbus site with Sentinel 3. As always, our software team are ready to help with integration of Sentinel 3 into an existing data acquisition platform which typically might include current probes, E-field probes and RF amplifiers.

About PPM Test
PPM Test is a division of pulse power and measurement Ltd. which has been manufacturing RF over fibre systems since 1995. PPM have supplied RF over fibre to some of the world’s largest manufacturers of aircraft, military and civilian vehicles. The company develops and manufactures in Swindon, UK.
Per maggiori informazioni contattaci: https://www.lunitek.it/contatta-sensoristica-e-acquisizione-dati/