GEA SYSTEM – IoT solution for monitoring and early-warning of displacements
Based on:
- Networks of GNSS L1 low-budget sensors
- 3-D displacements with millimetre level repeatability

Application fields:
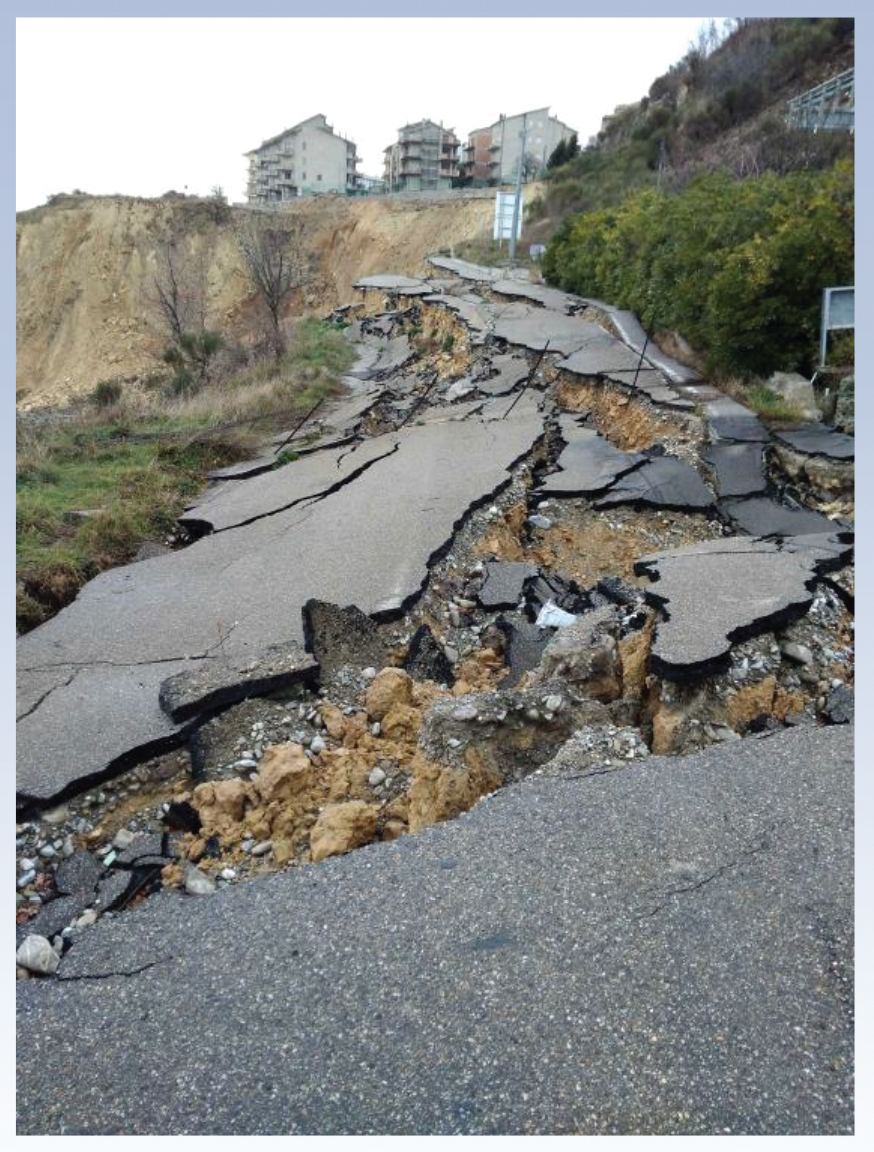
- Landslides, subsidence, co-seismic deformations
- Critical infrastructures
- Deformations due to human
- Activities: Excavations, injection/extraction of natural gas
Features:
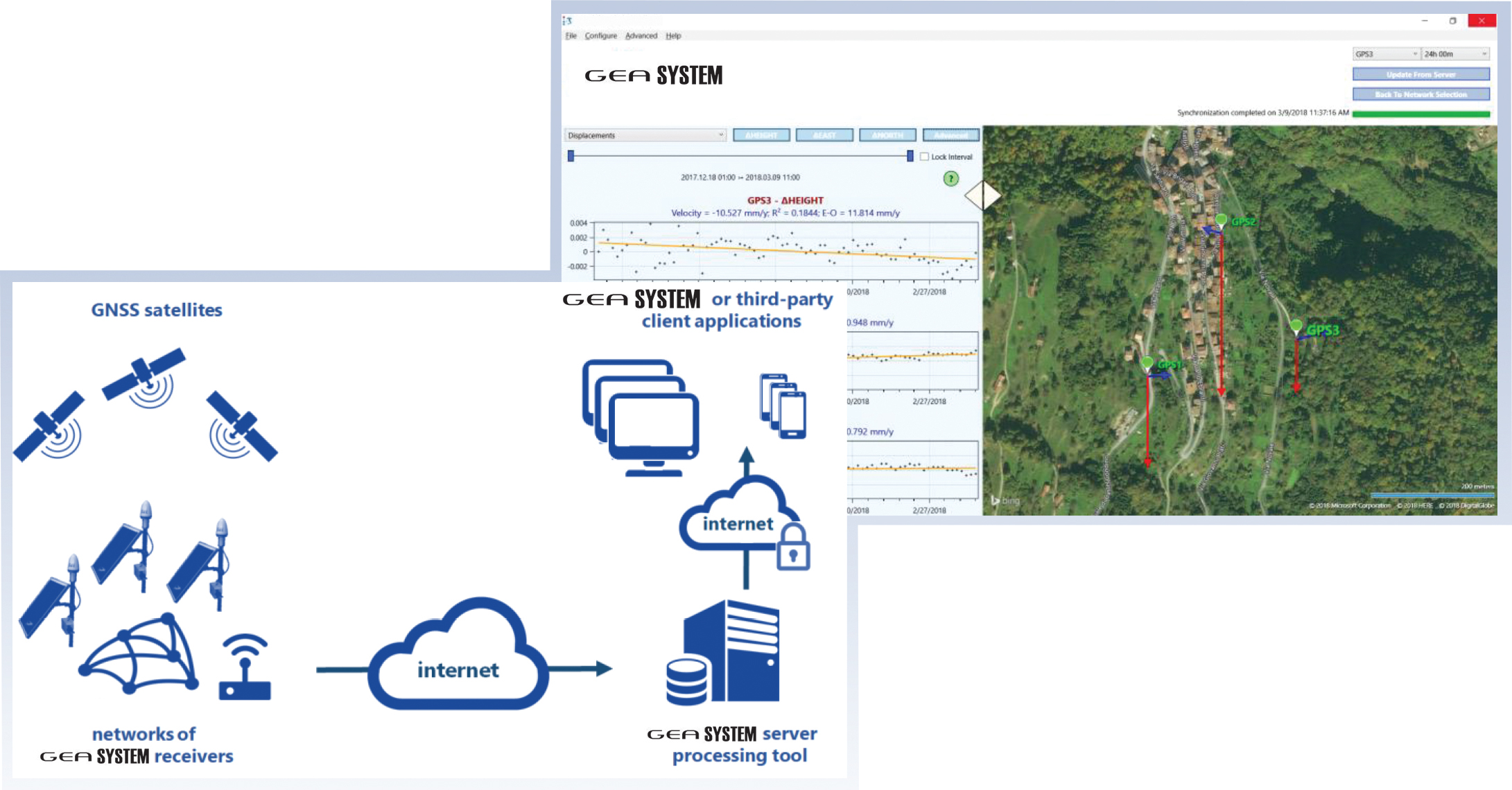
- GEASYSTEM nodes are composed of lightweight, compact, low energy consumption, single-frequency GNSS stations, power supply modules based on photovoltaic panels and 868 MHz wireless interfaces for the transmission of data
- Receivers installed at a monitoring site form wireless mesh networks, transmitting in real-time GNSS raw observations and telemetry data to a gateway node, equipped with internet connectivity. Network data are collected at a server where a specific SW computes displacements with millimeter level repeatability
- A dedicated dashboard (client application) allows the User to display data on a map and on graphics with time series of 3-D displacements and telemetry data
- GEASYSTEM can be configured to send alert e-mail in case of system malfunctions or when specific User defined displacements thresholds are exceeded, thus allowing forecasting of possible dangerous events
- Publication of displacements and telemetry data is made through REST web services allowing the integration of measurements in pre-existing and
custom dashboards
HARDWARE SPECIFICATIONS
| GNSS | |
| Receiver: | U-BLOX M8T |
| Antenna: | MOBI MBGPS GNS-30-001; frequency range 1575.42±10 MHz; gain 30±3 dBi; SMA female connector; 3.3V (different options on request) |
| WIRELESS CONNECTION | |
| Type: | 868 Mhz, link wireless 0.5W. TDMA proprietary transmission protocol |
| Antenna: | Directional gain 13dBi or omni-directional gain 3dBi; SMA female connector; 3.3V (different options on request) |
| Range: | 8 km LoS |
| Networking: | Up to 14 nodes connected to a single gateway; mesh network; each node can be configured as node or gateway by the User |
| POWER | |
| Photovoltaic panel: | 20Wp (optional 50Wp) |
| Battery: | 12V 12Ah (144Wh); charge from -15 to 50 Celsius |
| Autonomy: | Potentially unlimited (considering 2 hours of sunlight per day – 20Wp panel); a fully charged battery at 20 Celsius can power up the station for more than 12 days in case of total dark |
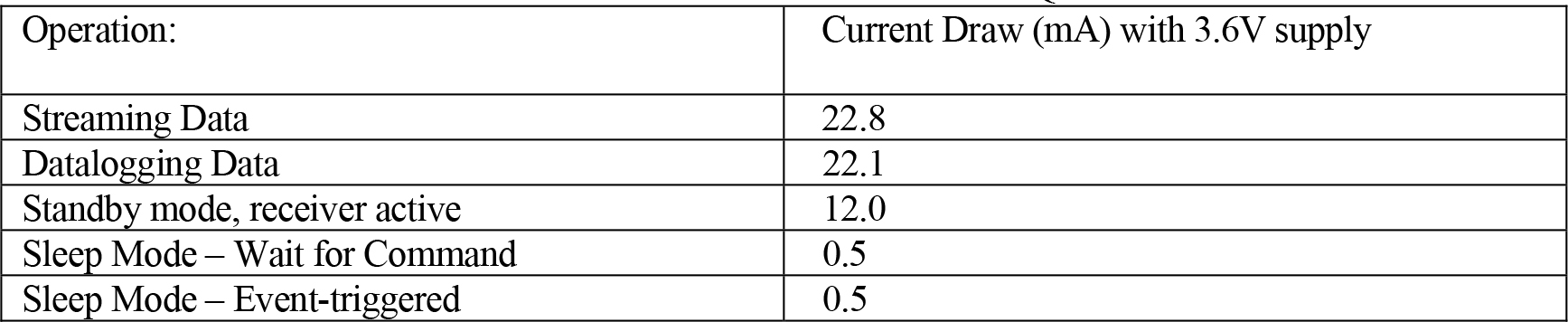
| Power consumption: | < 390mW on average (including antenna) |
| OTHER | |
| Protection: | IP65 |
| Dimensions: | GNSS Unit 17x10x5.5 cm
GNSS Antenna 8×13 cm Photovoltaic panel (20Wp): 34x50x2.4 cm Wireless antenna (Yagi): +13dBi Whip. 63×18 cm |
DISPLACEMENTS CALCULATION SOFTWARE
| GEASYSTEM GNSS CORE | |
| Programming language: | C and C++ |
| 3rd party libraries: | RTKLIB (v. 2.4.2, BSD-2 license); used for GNSS data reading and clocks syncronization |
| Processing: | Proprietary double-differences batch least square estimator developed to reach maximum performances in term of displacements repeatability for static monitoring applications |
| Repeatability: | From 1 to 3 mm RMS for 24 hours batch of data (according to distance and height difference between reference and rover and to satellite visibility and possible multipath) |
Per maggiori informazioni contattaci: https://www.lunitek.it/contatta-sensoristica-e-acquisizione-dati/